CoreXYZ: a low-inertia 3D motion platform
This project introduces a 3D motion system comprising 3 fixed motors. This design extends Ilan Moyer's original coreXY by adding a Z axis. The 4 cables/belts going to the carriage are repurposed to actuate a shallow Z axis. This is achieved by exchanging slack between the two loops using a third motor in the back of the machine.
This is an ongoing project, but a proof-of-concept mechanism has been built to demonstrate the kinematics of CoreXYZ:
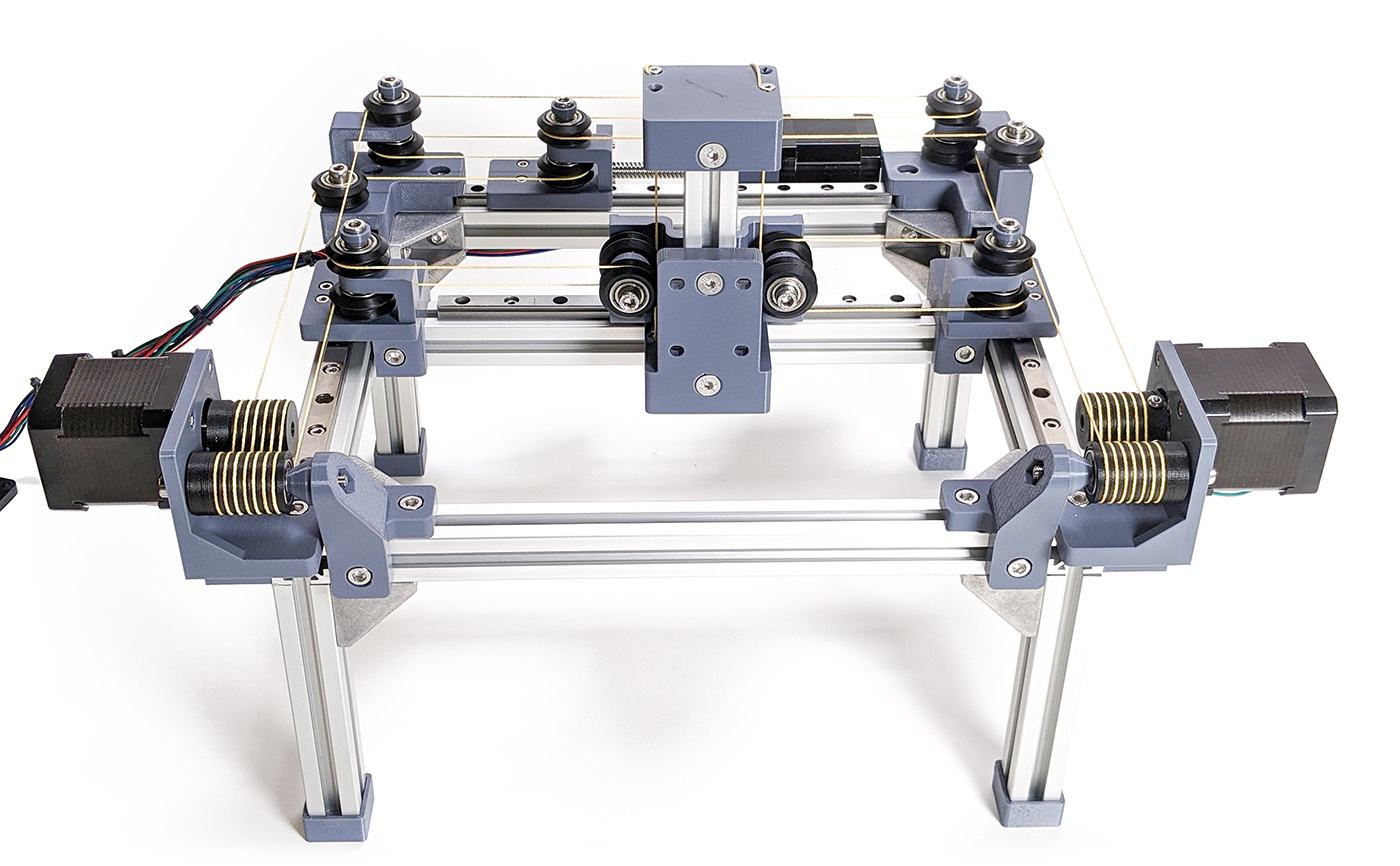
Here is a demo of X, Y, and Z actuation, respectively:
Here is a more involved demo:
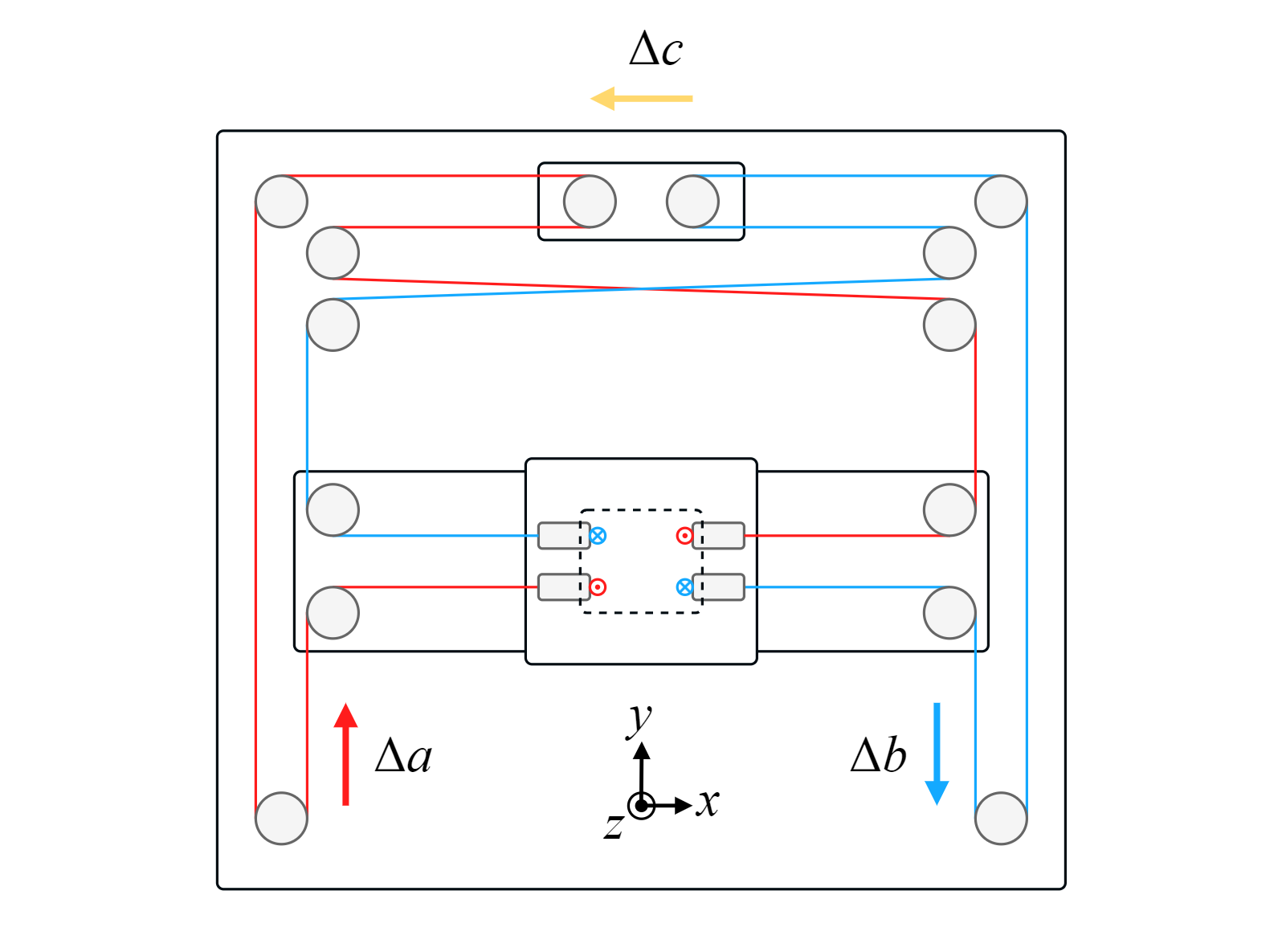
How it works
This mechanism is very similar to the original CoreXY, but includes an additional motor in the back that displaces a set of two pulleys that effectively transfers a given length of cable from one loop to the other. This allows the four cables going to the carriage to push/pull the end effector along Z. You can learn more about the kinematics here.
It should be noted that other mechanisms with the name CoreXYZ have been proposed, but the version peresented here is the most closely related to the original CoreXY design, as it simply adds Z actuation to the carriage by adding functionality to cables that were already present.
Examples
An example implementation is presented here.
About
This project was developed at MIT's Center for Bits and Atoms by Quentin Bolsée.
You can learn more here.