CoreXYZ: Theory
The kinematic model is an extension of the original coreXY, with an additional Z axis. Here is a diagram showing all moving parts and the 3 degrees of freedom:
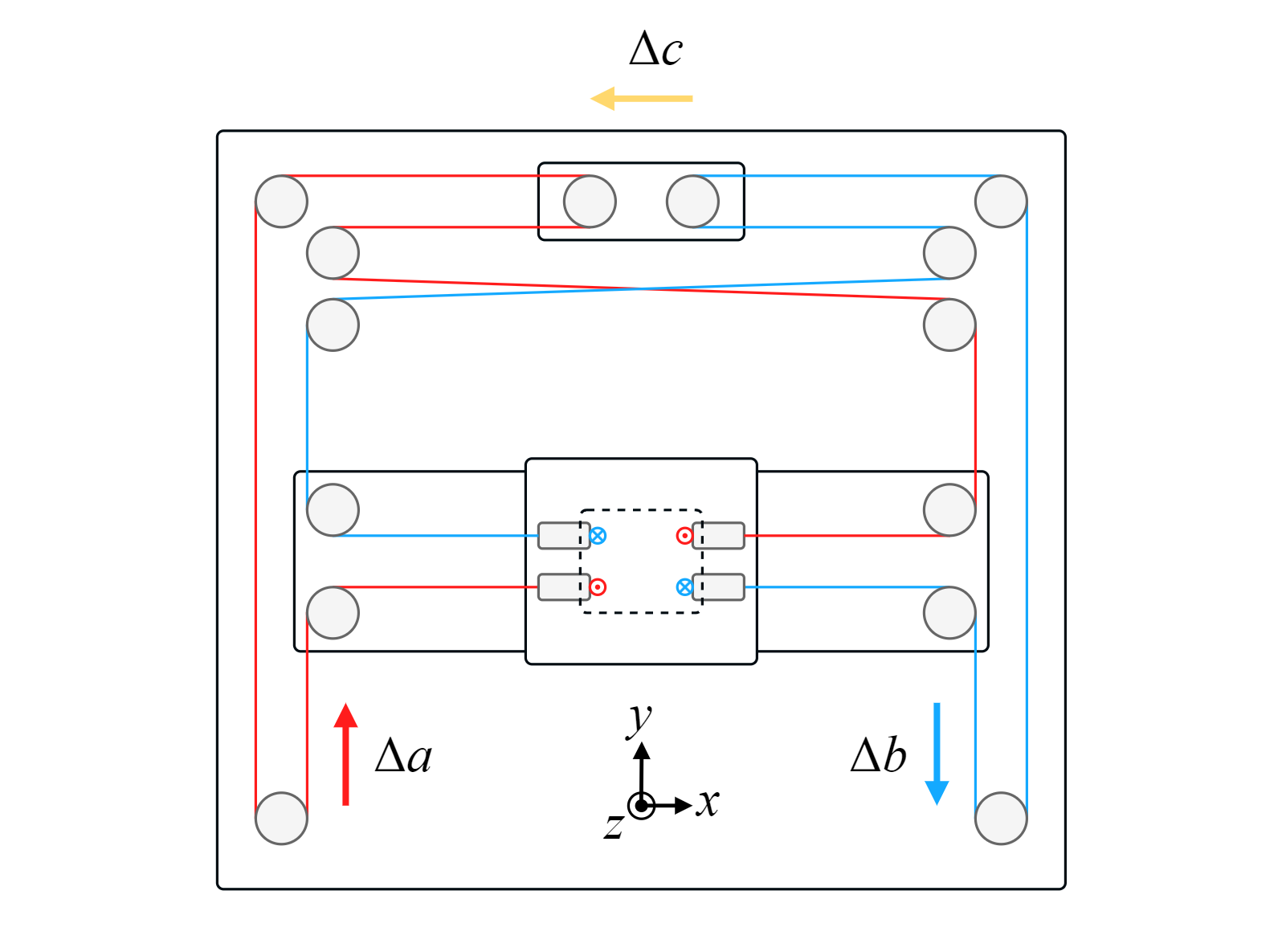
For a linear motion \((\Delta a, \Delta b, \Delta c)\) on the left, right and back motors respectively, the resulting \((\Delta x, \Delta y, \Delta z)\) motion of the end effector is given by:
$$ \begin{cases} \Delta x = \frac{\Delta a + \Delta b}{2} - \Delta c\\ \Delta y = \frac{\Delta a - \Delta b}{2}\\ \Delta z = \Delta c \end{cases} $$Solving for \((\Delta x, \Delta y, \Delta z)\) yields:
$$ \begin{cases} \Delta a = \Delta x + \Delta y + \Delta z\\ \Delta b = \Delta x - \Delta y + \Delta z\\ \Delta c = \Delta z \end{cases} $$Those two set of equations provide the motor actuation necessary for a given end effector displacement, and vice versa.